
")







3DT-Mobile Mapping System - iStar Edition
Codice:
Sistema mobile di acquisizione di immagini panoramiche
| 3DT Mobile Mapping System Manager è la piattaforma di sincronizzazione proprietaria di 3D Target per la registrazione delle osservazioni da diversi sensori in ambienti mobile in un database temporale. Non ci sono limiti alla quantità e alla natura dei sensori collegabili alla piattaforma: ogni elemento è gestito attraverso un sistema di plugin che permette eventualmente l'aggiunta di ulteriori componenti in fasi successive.
Il "semplice" rilievo fotografico ad altra frequenza permette in molti casi una documentazione sufficiente per la maggior parte delle esigenze base. La piattaforma può prevedere strumentazioni di diversa natura:
La soluzione dedicata alla fotocamera iStar prevede i seguenti componenti:
|
 |
|
|
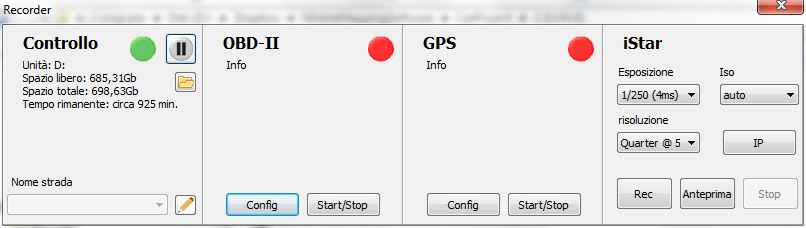
Il ricevitore GPS permette di referenziare instante per istante le immagini, con un'accuratezza tipica assoluta entro i 10 metri in condizioni ideali di visibilità dei satelliti. L'upgrade ad un sistema RTK è disponibile opzionalmente. L'interfaccia OBD-II, attraverso il collegamento alla centralina del veicolo utilizzato per il rilievo, consente di ottenere, con la lettura del valore della velocità istantanea, la misura dello spazio percorso ed attivare la ripresa delle immagini ad intervalli di percorrenza costanti. La fotocamera panoramica iStar consente di riprendere immagini panoramiche sferiche con un angolo di campo verticale di circa 150° ed una risoluzione massima di 50 mpixel. La frequenza spaziale massima di campionamento delle immagini (in metri) dipende dalla velocità di percorrenza e dalla risoluzione desiderata, secondo la seguenta tabella:
|
|
La camera è fissata in sicurezza sul tettuccio del veicolo attraverso un dispositivo di ritenuta dotato di 3 ventose, un supporto in alluminio per sollevare la posizione dello strumento al fine di minimizzare l'occlusione del campo visivo causata dalla vettura stessa ed eventuali contrappesi stabilizzanti. La connessione della videocamera sul supporto avviene attraverso un dispositivo a sgancio rapido e un cavo di sicurezza può essere opzionalmente assicurato al corpo dello strumento. E' possibile fornire supporti di installazione rigidi o di ancoraggio alle barre portatutto del veicolo, con quotazioni su richiesta. |
|
 |
Il sistema include inoltre un laptop rugged, specificatamente progettato per l'utilizzo in movimento, che garantisce le prestazioni necessarie per gestire la quantità di informazioni ricevute dai sensori istante per istante attraverso la seguente configurazione:
Il computer rugged è predisposto per una comoda e sicura installazione del sistema tramite apposito supporto compatibile e personalizzabile per qualsiasi veicolo. |
|
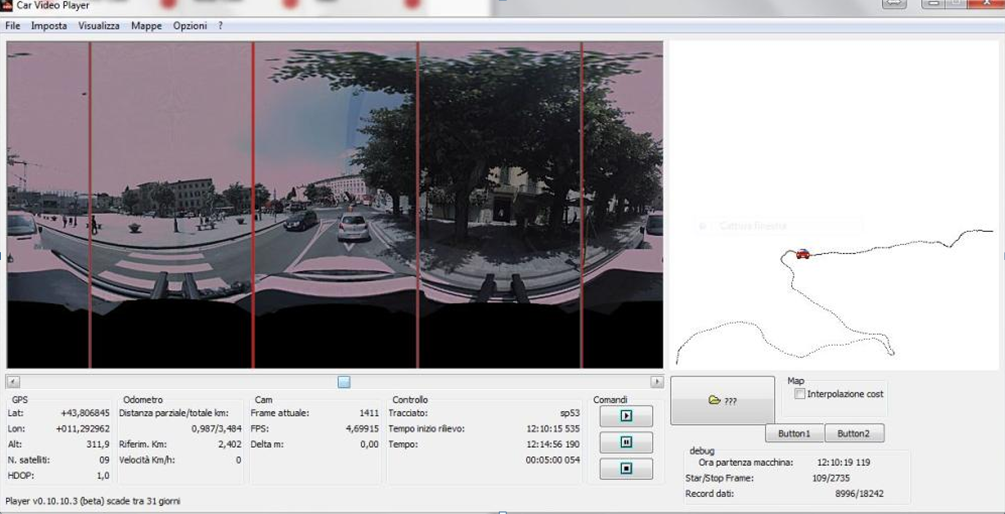
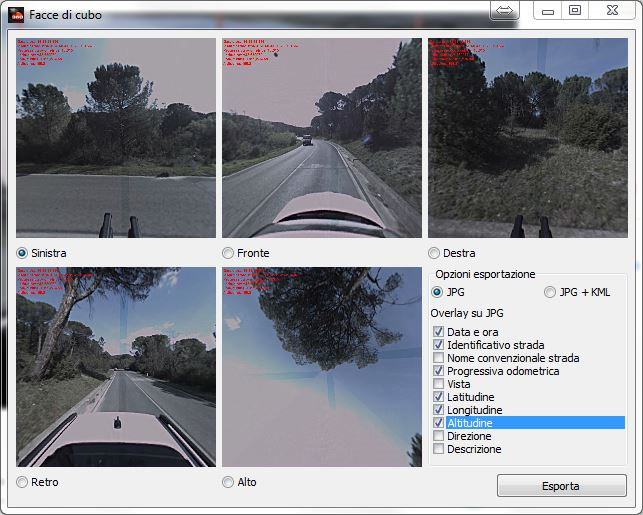
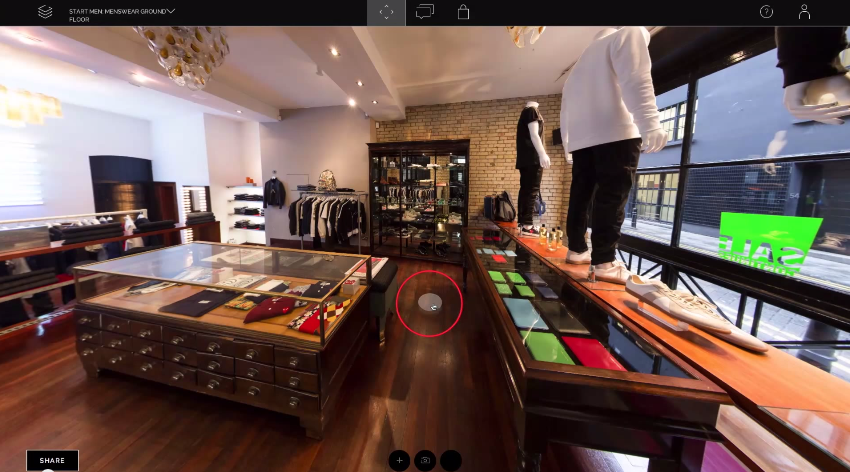
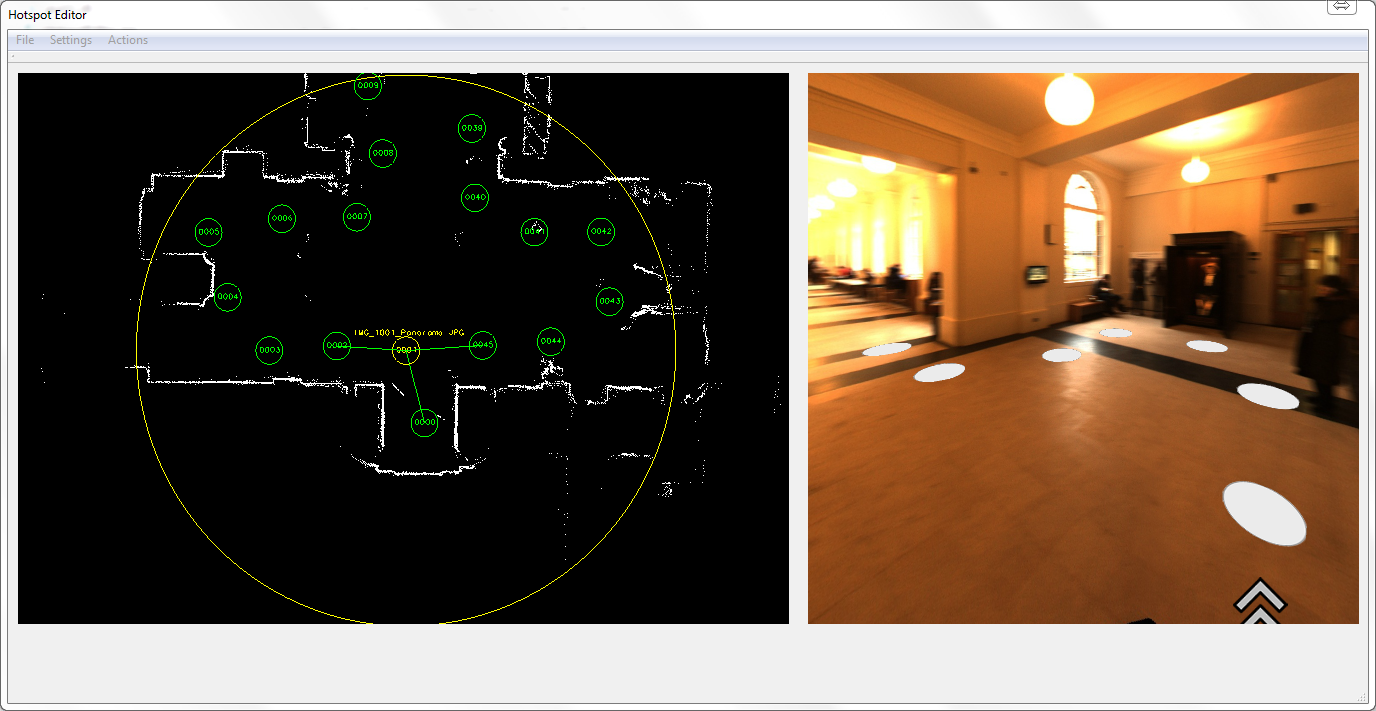
Il sistema così progettato può essere usato per circa 2 ore senza l'ausilio di alimentazione esterna. La dotazione software è completata dal pacchetto Smart Processing Camera Edition che permette la visualizzazione dei dati catalogati nel database temporale, associando la posizione di ogni immagine panoramica ripresa alla posizione su una mappa in formato OpenStreetMap. La posizione di ciascuna immagine può essere altresì collegata alla progressiva odometrica, o riferita ai cippi chilometrici individuati manualmente nelle immagini. E' gestita inoltre l'estrazione e l'esportazione dell'intera immagine panoramica in proiezione equi-rettangolare, o di porzioni di essa, nei formati jpg e kml/kmz. Opzionalmente, possono essere sovraimpresse sulle immagini informazioni sul rilievo quali la data e l'ora, la latitudine e la longitudine, la progressiva chilometrica ed il nome della strada percorsa. Sequenze di immagini possono essere esportate anche come video. E' supportato l'output automatico di un tour virtuale composto dalla sequenza delle immagini panoramiche riprese, collegate tra di loro attraverso opportuni hotspot, in formato Flash e HTML5 su piattaforma krpano o attraverso le API di Google Street View. |
 |





{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}