
")







3DT-Mobile Mapping System - iStar Edition
Sku:
360° Panoramic Images Mobile Mapping System
|
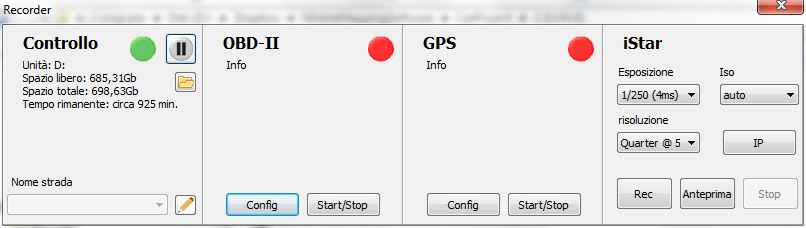
3DT Mobile Mapping System Manager is the synchronization platform property of 3D Target to record the observation from different sensors from a mobile environment in a temporal database. There are no limits to the quantity and the nature of the sensors that can be connected to the platform: every component is handled by a dedicated plug-in system allowing the addition or the upgrade of new sensors at different stages. The iStar panoramic camera solution features the following components:
|
 |
 |
GPS receiver allows to georeference each of the panoramic images taken with the iStar, with a typical absolute accuracy of approximately 10 metres in ideal conditions. RTK upgrade, to increase the accuracy, is available on request. OBD-II interface reads the speed of the vehicle with a direct connection to the on board diagnostic, allowing to measure the distance traveled and trigger the camera at defined spatial intervals. iStar panoramic camera allows to shoot high resolution spherical panoramic images with a vertical field of view of 150° and a maximum resolution of 50 mpixel. Maximum distance between subsequent shots (in metres) depends on the vehicle speed and the resolution of the camera, according to the following table:
|
| The camera is installed on the roof of the vehicle by the means of a tri-base suction cup holder, an aluminum pole to raise the height of the camera and minimize the footprint of the roof itself from the images and, if needed, counter weights to stabilize the setup. A quick release device allows to easily detach the camera, a safety wire can be optionally secured to the body of the camera. Rigid installation or anchor point to the roof rack of the vehicle can be designed and quoted on request. |
 |
 |
The system also includes a rugged laptop, specifically designed for the use in motion, providing the power needed to handle the huge amount of data received from the sensors. Here follows the minimum configuration of the system:
Rugged computer includes the accessories to allow for a secure mount, with a dedicated holder for any vehicle model. |
|
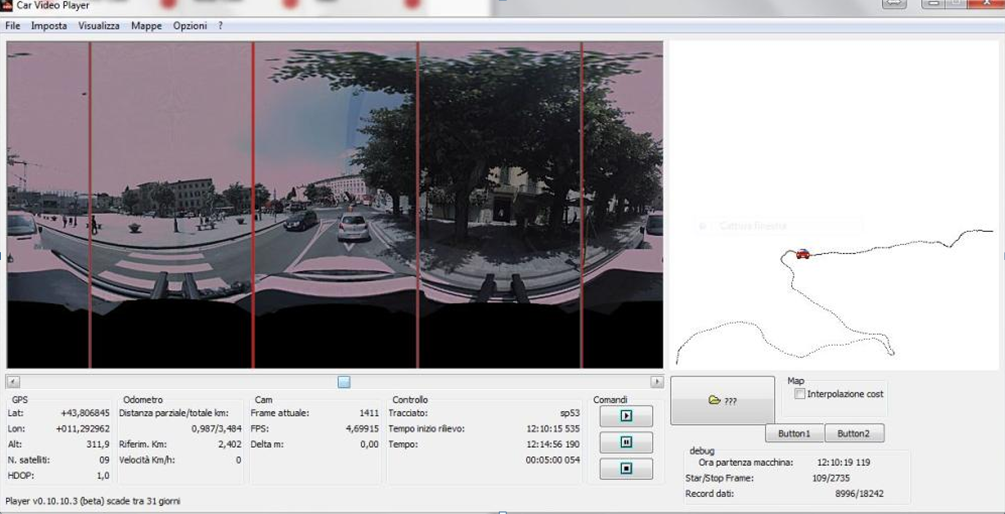
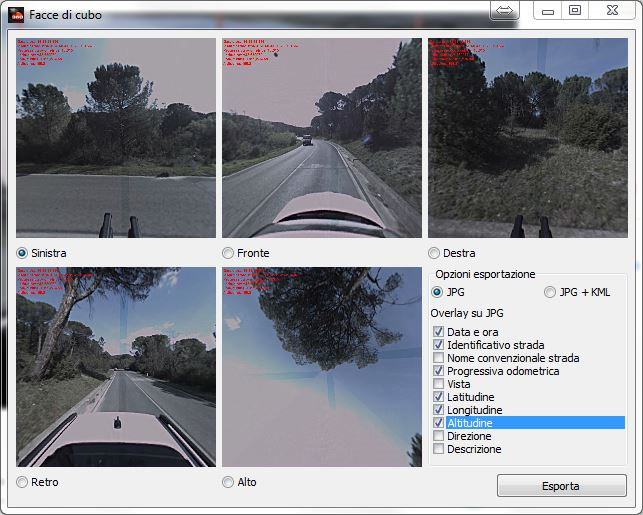
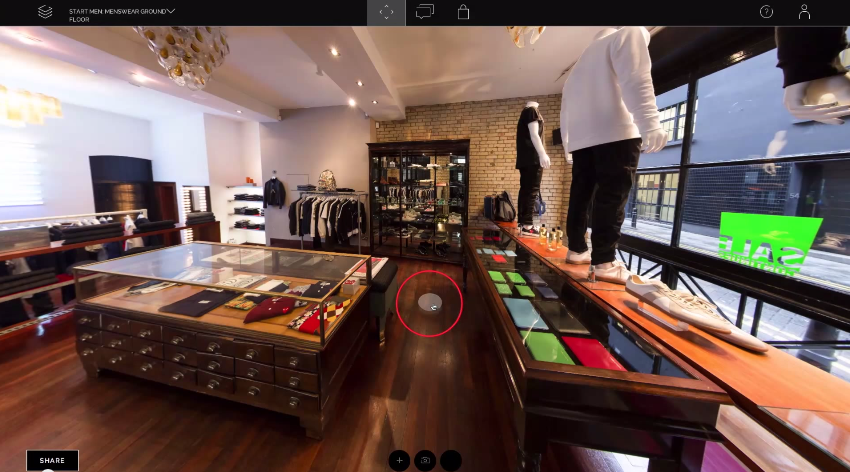
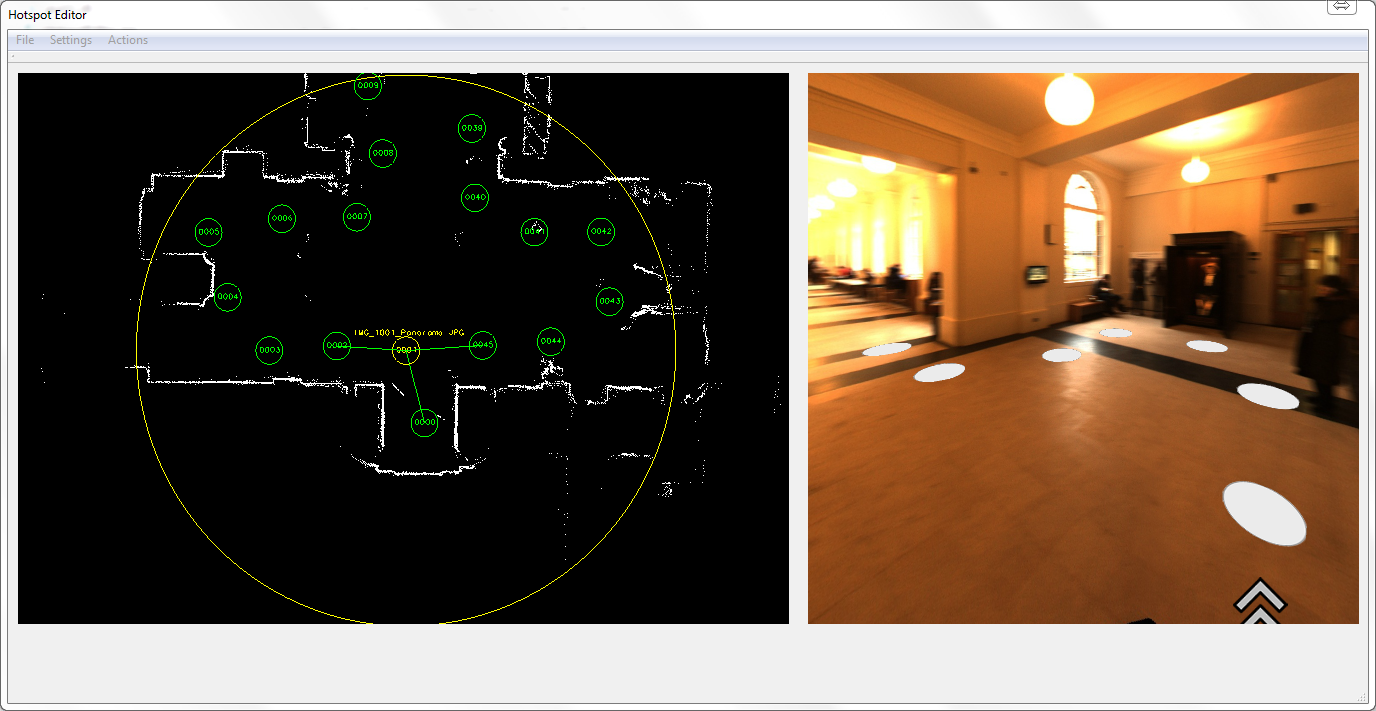
The system can run for about two hours without any external power supply. Software also includes Smart Processing Camera Edition package, to visualize the information stored in the temporal database and associate the position of each image with the map in OpenStreetMap format. Each image can also be associated to the distance traveled by the vehicle and to manually identified reference points along the track. Pictures can be extracted and exported in equirectangular or rectilinear projections in jpg and kml/kmz format. The software also produces a virtual tour from the sequence of panoramic images, connecting them via hotspots, in Flash and HTML 5 format for the upload in web servers. Street View APIs are supported for the direct upload in Google platform. |
 |



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}